Grove GMK 4075 All Terrain Crane
Motivation
Motivationen til at bygge denne kran var mere eller mindre spontan, en lokal
vognmand Henning Petersen A/S
, udvidede i marts 2003 vognparken med en 75 tons mobilkran, Grove GMK4075. Jeg var et par gange med og se
den arbejde pċ forskellige pladser, og konstruktionen interesserede mig, og jeg tĉnkte at det kunne vĉre sjovt
at bygge en LEGO model af den.
I november 2003, gik jeg sċ igang med at bygge modellen, og den var fĉrdiggjort omkring 14 dage senere.
Mċlet med denne mobilkran er at bygge en sċ funktionsdygtig model som muligt, i fĝrste omgang ville jeg ikke
ligge vĉgt pċ det korrekte udseende, men blot bygge en 4-akslet mobilkran med teleskop-arm og fastmonteret
knĉkbar jib.
Data
Jeg valgte at bygge kranen i skala 1:20, ud fra forventningen til byggetiden og tidligere erfaringer med
teleskopkraner. Det er ofte et problem at bygge en lang arm da vĉgten er en afgĝrende faktor, og mange
udskydelige led giver ogsċ ĝget vĉgt, store dimensioner pga. klodsernes tykkelse.
De data jeg havde at gċ efter for den originale kran, er indfĝrt herunder, se eventuelt mere her.
 |

| Maks kapacitet |
80 t |
|
| Hovedarm |
43.2 m |
|
| Udskydelige led |
4 |
|
| Knĉkbar jib |
10- 27 m |
|
| Motor |
Mercedes-Benz 422 HK |
|
| Fremdrift og styring |
8x8x8 / 8x6x8 |
|
| Topfart |
78.5 km/h |
|
| Kĝreklar vĉgt |
48 t |
|
|
LEGO model
Herunder har jeg beskrevet opbygningen af kranen i de enkelte dele.
Undervogn
Undervognen pċ den originale kran er opbygget med 4 styrbare aksler der kan styres individuelt.
Der findes overordnet 3 mċder at styre pċ; Man kan styre almindeligt, dvs. bagerste aksel helt fast,
dreje omkring center eller krappestyring.
Jeg har valgt at konstruere denne model sċ den kun kan dreje omkring center. Skulle de andre to
muligheder have vĉret implementeret havde det vĉret nĝdvendigt med flere gearinger eller linkning
imellem styrestĉngerne.
Styringen er implementeret med en langsgċende aksel med tandhjul i 2 forskellige stĝrrelser,
én stĝrrelse tandhjul for aksel 1 og 4, og en mindre stĝrrelse for aksel 2 og 3.
Pċ aksel 1 og 2, sidder styrestĉngerne foran hjulakslerne, pċ aksel 3 og 4 sidder styrestĉngerne bag hjulakslerne.
Denne lĝsning er valgt for at undgċ flere gearinger med voksende slĝr til fĝlge.
Alle aksler pċ modellen er uafhĉngigt affjedret med de smċ lego fjedre 0732 og 0731
. Hver enkelt aksel er monteret pċ en lille vippearm. I hvert vippeled er indbygget et kardankryds hvortil styringen lĝber. Oven over hver vippearm, lĝber
den langsgċende aksel til styringen. Affjedringens hċrdhed er nogenlunde afpasset til vĉgten af hele kranen. Dog
er den langsgċende balance bedst, nċr der hĉnges en lille ballastklods pċ kranen. Hvilket skyldes den manglende vĉgt
af overbygningen, og kranfĝrehuset.
Drejekrans
Drejekransen pċ denne kran er opbygget omkring den store drejekrans 2855 og 2856
Den store udvendige tandkrans er forbundet til et lille tandhjul der drives gennem en gearing af et lille hċndsving
pċ siden af undervognen.
Efter opbygningen af resten af kranen viste det sig at belastningen pċ drejekransen blev for stor, den kunne ikke
klare en lille skĉv belastning i forholdet imellem last og kontravĉgt.
Lĝsningen pċ dette problem blev at indbygge nogle bĉreruller i overbygningen der kan fordele belastningen imod
undervognen. Der er indsat en rulle foran, bagpċ og pċ begge sider. Rullerne er lavet af et lille teknik hjul.
Overbygning
Den ting der er ĉndret flest gange pċ kranen er overbygningen. Da hovedarmen er blevet ĉndret nogle gange har det
krĉvet en hel ombygning af overbygningen ogsċ. Billederne der er vist, er desvĉrre kun af den sidste version
hvor kun ophĉng til hovedarm, cylinder, drejekrans og kontravĉgt er pċbygget. Kranhuset og opbygningen omkring denne
er ikke pċbygget. Ligeledes er wirer til krog og teleskop fjernet.
Bag pċ overbygningen er lavet ophĉng til kontravĉgt, jeg har lavet to kontravĉgte. Den ene er opbygget med 8 standard
LEGO vĉgtklodser 73090, hvilket giver en vĉgt
pċ omkring 0.5kg. Den anden vĉgtklods er bygget op omkring en stċlklods pċ ca. 1 kg.
Ophĉnget til hovedarmen og hovedcylinderen er lavet meget kraftigt for at klare den store belastning. Nċr
kranen skal rejses fra vandret position med en jib monteret, er der meget stor belastning pċ overbygningen, og det
er tydeligt at se at teknik elementerne bĝjer.
Hovedarm
Den svĉreste del at bygge pċ en mobilkran med teleskoparm er selve hovedarmen. Pga. af en LEGO klods' tykkelse resulterer
flere udskydelige led at den yderste del af armen bliver meget tynd og den nederste del meget tyk.
Den rigtige kran er udstyret med 4 udskydelige led, jeg har her valgt kun at lave 3 udskydelige led. Pċ den mċde
bliver den yderste del af armen 2 klodser tyk, og den nederste 8 klodser. Desvĉrre er en teleskoparm i LEGO ogsċ meget
tung pga. de tykke materialer sċ det er svĉrt at lave en lang arm.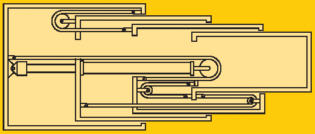 Armen er opbygget med 2 teknik bjĉlker ovenpċ hinanden med 2 flade klodser imellem for at give armen tilstrĉkkelig styrke.
Ved hver samling pċ armen er der lavet en kraftig forstĉrkning for at klare det ĝgede moment.
Fĝrste version af armen var lavet med et wiretrĉk til at trĉkke armen ud. Trĉkket er lavet sċ man kun trĉkker i den
nederste wire, de andre wires er koblet sċ hver enkelt trĉkker det nĉste led ud, og derved kan man nĝjes med at trĉkke
i den nederste og dermed skydes alle led ud. Ulempen er at der skal trĉkkes ret hċrdt i den nederste wire specielt hvis
der er belastning pċ armen. Systemet er vist her til hĝjre, blot med et hydraulisk stempel til at skyde fĝrste led ud.
Armen er opbygget med 2 teknik bjĉlker ovenpċ hinanden med 2 flade klodser imellem for at give armen tilstrĉkkelig styrke.
Ved hver samling pċ armen er der lavet en kraftig forstĉrkning for at klare det ĝgede moment.
Fĝrste version af armen var lavet med et wiretrĉk til at trĉkke armen ud. Trĉkket er lavet sċ man kun trĉkker i den
nederste wire, de andre wires er koblet sċ hver enkelt trĉkker det nĉste led ud, og derved kan man nĝjes med at trĉkke
i den nederste og dermed skydes alle led ud. Ulempen er at der skal trĉkkes ret hċrdt i den nederste wire specielt hvis
der er belastning pċ armen. Systemet er vist her til hĝjre, blot med et hydraulisk stempel til at skyde fĝrste led ud.
Hovedarmen mċtte forstĉrkes da den skulle udvides med en jib. Under forstĉrkningen blev det omtalte wiretrĉk demonteret
og blev ikke monteret igen pċ 2. version.
Til at rejse hovedarmen, er anvendt et pneumatik (trykluft) stempel. Til fĝrste version blev anvendt 8 af de almindelige
dobbeltvirkende pneumatik stempler. De var koblet i par, 4 par efter hinanden. Det var ikke en sĉrlig kĝn lĝsning, og
den manglede kraft til at rejse armen. For nogle ċr siden forsĝgt jeg at bygge en lastbil med tiplad. Her manglede
de almindelige teknik stempler ogsċ kraft, og min far hjalp mig derfor med at bygge et nyt stempel med stĝrre diameter
og lĉngere bevĉgelsesomrċde. Stemplet er 3 klodser i diameter og har en arbejdslĉngde pċ 14 klodser.
Med en diameter pċ 3 klodser har stemplet 2.25 gange kraft af et almindeligt LEGO stempel. Hvilket er tilstrĉkkeligt
til at rejse armen pċ denne mobilkran.
Ialt er hovedarmen 1.8 m lang ved fuldt udskud, og 0.56 m skubbet sammen. Armen kan rejses op til ca. 87 grader.
Flyjib
En mobilkran med en almindelig hovedarm har ofte problemer med at nċ et stykke ind over eksempelvis en hĝj bygning.
Skal man eksempelvis 15 meter ind pċ en bygning der er 30 meter hĝj, er det ofte en fordel at kunne knĉkke armen pċ
kranen. En ret arm skal vĉre meget hĝj, for at nċ de sidste 15 meter ind over bygningen.
Denne kran er ogsċ udstyret med en arm der kan knĉkkes. Denne arm monteres pċ enden af hovedarmen, inden denne
rejses. Den kan vĉre fra 10 m til 27 m, og knĉkkes pċ midten hydraulisk.
Jeg har ogsċ bygget en jib til denne mobilkran. Grundet vĉgt, er lĉngden reduceret til 0.6 m. Midtvejs er indbygget
en pneumatik stempel der kan knĉkke den yderste del af armen.
Under transport er jibben monteret pċ siden af hovedarmen, eventuelle udvidelsesstykker kan transporteres pċ trailer.
Jibben er monteret med et svingbart led der passer pċ enden af hovedarmen og kan derved monteres, svinges rundt og
fastspĉndes.
Resultat
Det har vĉret en udfordring at bygge denne model, desvĉrre var det svĉrt at bygge i korrekt skala forhold mht.
kranens rĉkkevidde, da LEGO's styrke og vĉgt gĝr lange arme uforholdsmĉssigt tunge.
Men kranen kan alligevel nċ 2.4 meter op, og er rimelig stabil. Kranen kan ikke lĝfte sċ meget da hovedcylinderen
kun lige kan lĝfte selve kranen, men det er typisk for en LEGO model, at den stĝrst udfordring er at kranen
kan bĉre sig selv.
Modellen blev aldrig helt fĉrdig da andre projekter pressede sig pċ, men mċske bliver projektet taget op igen en dag.
Da vil der mċske ogsċ vĉre lejlighed til at tage nogle bedre billeder af kranen udenfor.
Data
Herunder er data for den endelige LEGO model indfĝrt.
 |
|
| Maks kapacitet |
Ej testet |
|
| Maks hĝjde |
2.4 m |
|
| Hovedarm |
1.8 m |
|
| Udskydelige led |
3 |
|
| Flyjib |
0.2 - 0.6 m |
|
| Motor |
ingen |
|
| Fremdrift og styring |
8x0x8 |
|
| Kĝreklar vĉgt |
2.4 kg |
|
| Max kontravĉgt |
1.5 kg |
|
|
Opsĉtning af kran
Opsĉtning af denne type mobilkran udfĝres i 3 trin, opstilling af kran, montering af jib, rejsning og udskydning af
hovedarm. Jeg har her vist opsĉtning af LEGO kranen, pċ en lille billedserie.
 |
Kranen ankommer til det sted hvor lĝftet skal udfĝres, centerstyringen gĝr det lettere at komme
ind pċ trange steder. |
 |
Stĝttebenene sĉttes ned og giver den nĝdvendige stĝtte for kranen. |
 |
Jibben monteres forrest i hĝjre side, og svinges derefter rundt og monteres ogsċ i
venstre side. |
 |
Det yderste knĉkbare led lĝftes fra jorden. |
 |
Hovedarmen i sammenskudt tilstand rejses med jibben monteret. |
 |
Armen rejses til nĉsten lodret position. |
 |
Fĝrste led skydes op. |
 |
Andet led skydes op. |
 |
Da der her ikke er sċ hĝjt til loftet knĉkkes det yderste af jibben ned i vandret position. |
 |
Den store kontravĉgt monteres ogsċ for at yde kranen tilstrĉkkelig stĝtte, inden det tredje
og sidste led skydes op. |
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)